
The first full day on site kicked off with a mix of sun, sea, and serious setup work. After breakfast, we headed straight to the beach – no hesitation, straight into the water. It was the perfect way to shake off the long journey and enjoy a moment of freedom before the intensity of RoboCup truly begins.
Back at the hotel, the whole team gathered in the lobby to plan the day, unpack equipment, and organize tasks. Everyone split into their respective areas – mechanics, electronics, software, firmware and publicity – ready to dive in.
Meanwhile, part of the team ventured out to a local supermarket to stock up on supplies. It turned out to be more of a mission than expected: the language barrier made even simple things challenging. But with creativity and teamwork, we pulled it off.
After a quick bite to eat, the real work began.
The software team got everything tournament-ready – testing, tweaking, and fixing the final bugs. On the firmware side, there were still some battles with the wireless communication.
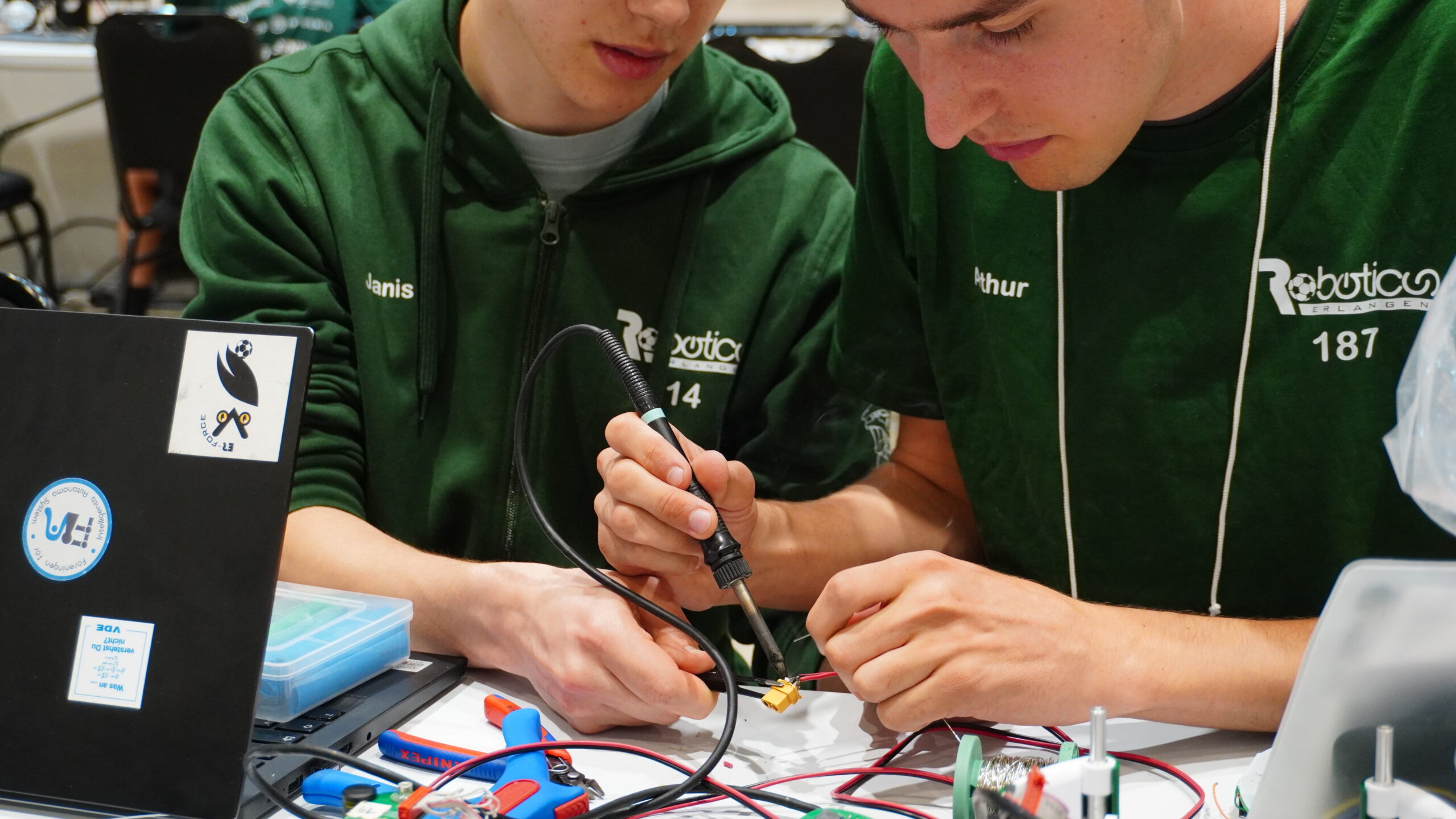
Electronics involved some re-soldering on the robots, and mechanically we added damping to the battery holders to prevent damage during rapid acceleration or sudden stops.
We also took the time to go through the scientific papers of the other teams qualified for RoboCup – gaining insight, inspiration, and valuable context for the competition.

The work carried on late into the night. It wasn’t always smooth, but the team powered through with determination and focus. We’re now fully arrived – with robots, team spirit, and a good dose of ambition in our luggage. Let’s get this RoboCup started!




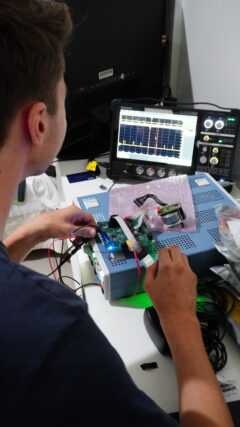 the tactical routines. At the same time, one topic kept coming back: wireless communication. Already a problem child during RoboCup in Bordeaux, the connection between robots and control remains a hot topic – and a critical one.
the tactical routines. At the same time, one topic kept coming back: wireless communication. Already a problem child during RoboCup in Bordeaux, the connection between robots and control remains a hot topic – and a critical one.


