
Überblick
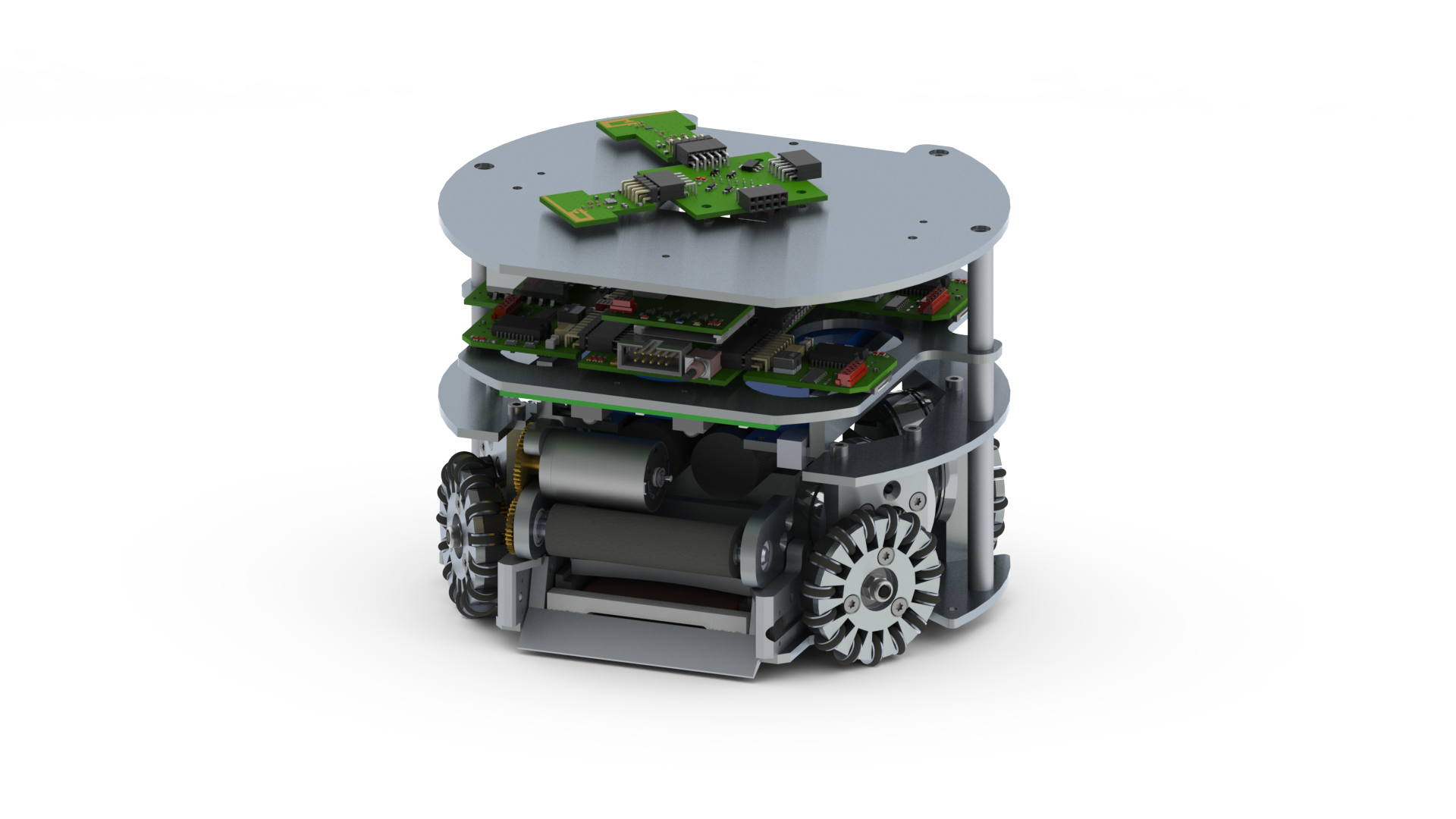 Die drei Hauptkomponenten des mechanischen Systems sind das Antriebssystem, das Schusssystem und die Dribbelvorrichtung. Das Funktionsprinzip der einzelnen Teile wird in den folgenden Abschnitten erläutert.
Die drei Hauptkomponenten des mechanischen Systems sind das Antriebssystem, das Schusssystem und die Dribbelvorrichtung. Das Funktionsprinzip der einzelnen Teile wird in den folgenden Abschnitten erläutert.
Das Antriebssystem
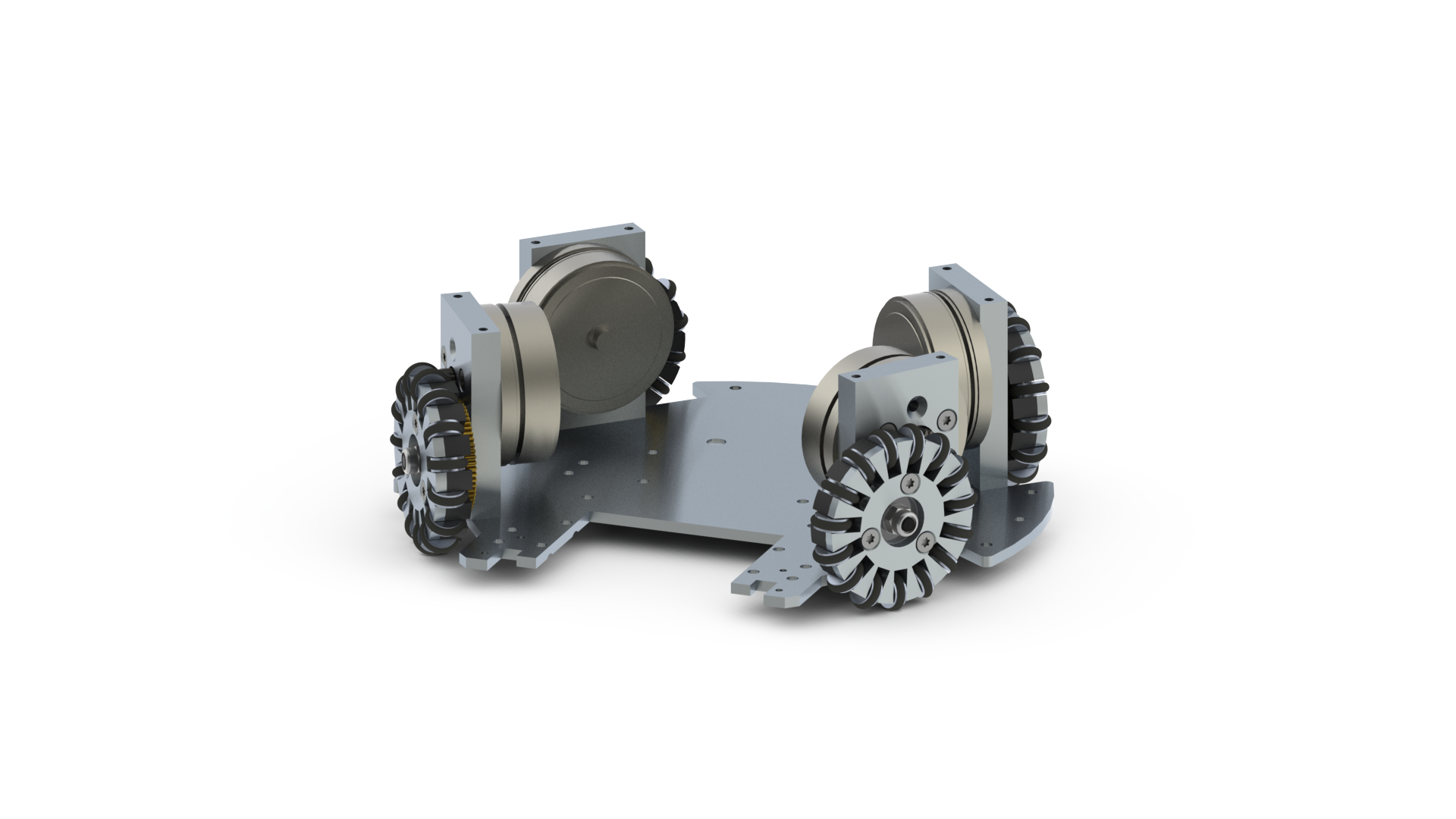 Der Roboter wird von vier 30-Watt-Maxon EC-Flachmotoren angetrieben. Ein Getriebe überträgt das Drehmoment auf die Räder. Die Räder unterscheiden sich von denen, die wir aus dem Alltag kennen: Da entlang des Umfangs sogenannte Subräder angebracht sind, kann sich das Rad auch in seiner axialen Richtung bewegen und wird daher als omnidirektionales Rad bezeichnet. Jedes omnidirektionale Rad hat 15 Unterräder, die auf einzelnen Achsen in Nuten im Hauptteil des Rades angebracht sind. Dieses Antriebssystem ermöglicht es dem Roboter, sich in eine beliebige Richtung zu bewegen und sich gleichzeitig um seinen Mittelpunkt zu drehen.
Der Roboter wird von vier 30-Watt-Maxon EC-Flachmotoren angetrieben. Ein Getriebe überträgt das Drehmoment auf die Räder. Die Räder unterscheiden sich von denen, die wir aus dem Alltag kennen: Da entlang des Umfangs sogenannte Subräder angebracht sind, kann sich das Rad auch in seiner axialen Richtung bewegen und wird daher als omnidirektionales Rad bezeichnet. Jedes omnidirektionale Rad hat 15 Unterräder, die auf einzelnen Achsen in Nuten im Hauptteil des Rades angebracht sind. Dieses Antriebssystem ermöglicht es dem Roboter, sich in eine beliebige Richtung zu bewegen und sich gleichzeitig um seinen Mittelpunkt zu drehen.
Der Schuss
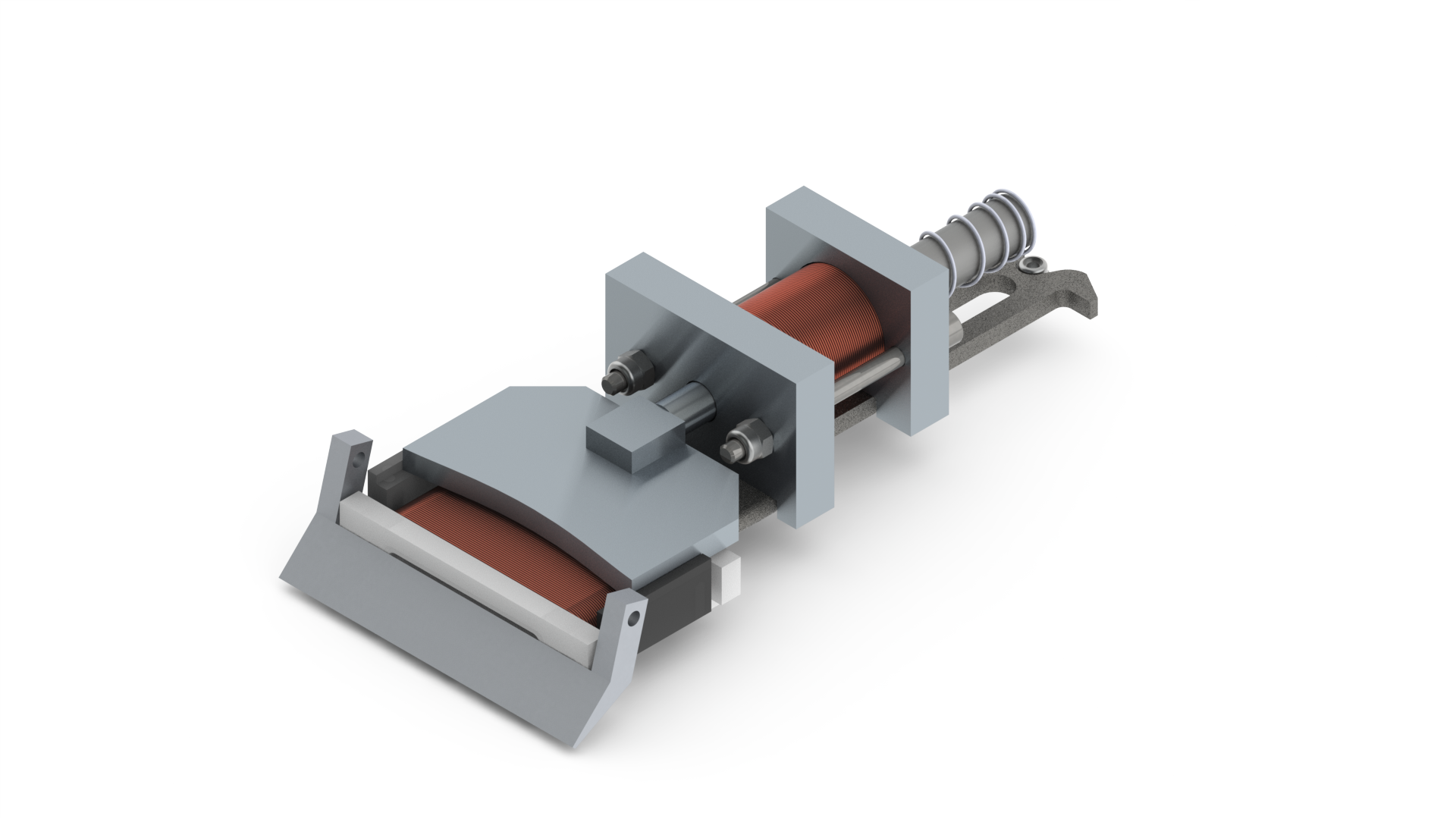 Das Schusssystem besteht aus zwei Subsystemen: dem Kicker, um den Ball linear zu schießen, und dem Chip-Kicker, um den Ball über andere Roboter zu chippen. Beide Kicker werden durch Magnetspulen ausgelöst, die in der Mitte unseres Roboters angebracht sind. Die Stößelstangen sind eine Kombination aus einem ferromagnetischen Teil und einem Aluminiumteil als nichtmagnetische Komponente. Wenn also ein Strom in den Magneten fließt, wird die Stahlstange angezogen und ein Impuls an den Ball abgegeben.
Das Schusssystem besteht aus zwei Subsystemen: dem Kicker, um den Ball linear zu schießen, und dem Chip-Kicker, um den Ball über andere Roboter zu chippen. Beide Kicker werden durch Magnetspulen ausgelöst, die in der Mitte unseres Roboters angebracht sind. Die Stößelstangen sind eine Kombination aus einem ferromagnetischen Teil und einem Aluminiumteil als nichtmagnetische Komponente. Wenn also ein Strom in den Magneten fließt, wird die Stahlstange angezogen und ein Impuls an den Ball abgegeben.
Der Dribbler
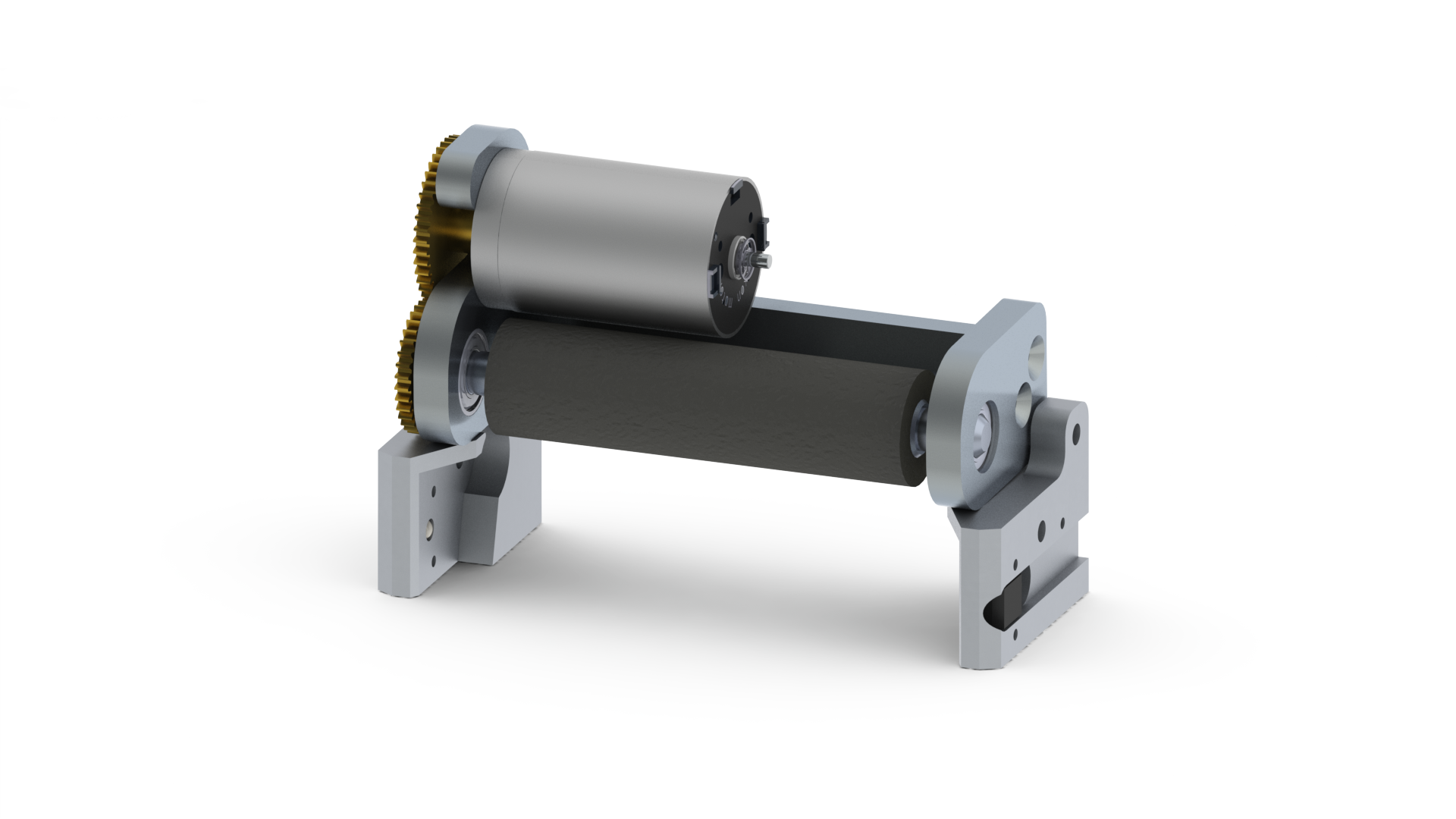 Natürlich ist es nach den Regeln nicht erlaubt, den Ball zu fangen und zu halten. Wenn der Roboter trotzdem in der Lage sein soll, den Ball zu kontrollieren, muss ein anderer Weg gefunden werden. Das Problem wird durch die Dribbelvorrichtung gelöst, die dem Ball im Grunde einen Backspin gibt. Dadurch bleibt der Ball in der Nähe des Roboters und ermöglicht sogar ein Zurücklaufen, ohne den Ballbesitz zu verlieren.
Natürlich ist es nach den Regeln nicht erlaubt, den Ball zu fangen und zu halten. Wenn der Roboter trotzdem in der Lage sein soll, den Ball zu kontrollieren, muss ein anderer Weg gefunden werden. Das Problem wird durch die Dribbelvorrichtung gelöst, die dem Ball im Grunde einen Backspin gibt. Dadurch bleibt der Ball in der Nähe des Roboters und ermöglicht sogar ein Zurücklaufen, ohne den Ballbesitz zu verlieren.
Die gesamte Vorrichtung ist in einer gedämpften, nach oben kippenden Struktur montiert, um die kinetische Energie des Balls bei der Annahme eines Passes zu reduzieren. Der Dribbelmotor, ein Maxon DC, treibt die Dribbelstange mit bis zu einigen tausend Umdrehungen pro Minute an. Um die Reibung zwischen Dribbelstange und Ball zu erhöhen, ist die Oberfläche der Stange aus Gummi.