Generation 2014 – 2017
 Unsere Roboter sind mit speziell entwickelten Schaltungen und Leiterplatten ausgestattet. Die Entwicklung erfolgt mit der Toolchain EAGLE von Cadsoft, einem professionellen Software-Paket für die Leiterplattenentwicklung. Darüber hinaus bestücken wir auch alle Platinen selbst.
Unsere Roboter sind mit speziell entwickelten Schaltungen und Leiterplatten ausgestattet. Die Entwicklung erfolgt mit der Toolchain EAGLE von Cadsoft, einem professionellen Software-Paket für die Leiterplattenentwicklung. Darüber hinaus bestücken wir auch alle Platinen selbst.
Die wichtigste Verbesserung dieser Generation ist ein erweitertes Modularisierungskonzept, das es uns ermöglicht, die Boards einzeln auszutauschen: Unser Bot besteht nun aus zehn verschiedenen Boards, die jeweils für eine bestimmte Aufgabe entwickelt und optimiert wurden. Die folgenden Abschnitte geben einen kurzen Überblick über die wichtigsten Boardtypen.
Power Distribution Board
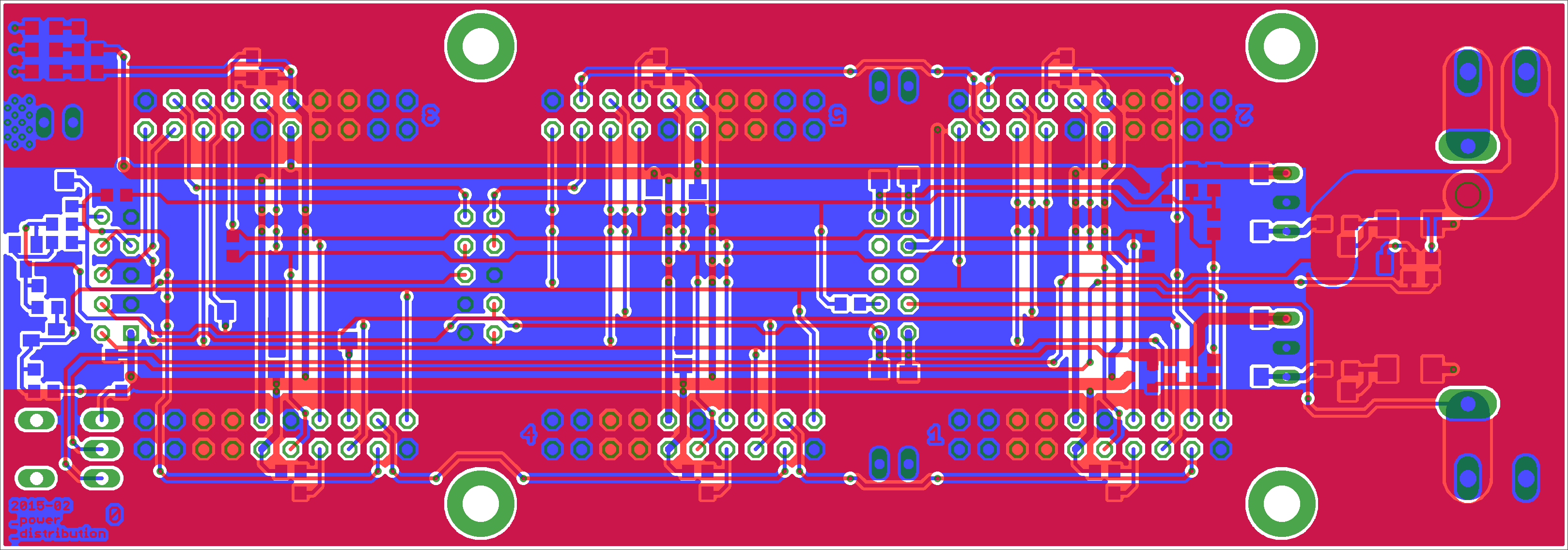 Die Stromverteilerplatine ist das Zentrum des Roboters. Wie der Name schon sagt, sorgt sie für die Erzeugung und Verteilung aller Versorgungsspannungen. Genauer gesagt hat sie Anschlüsse für die Lithium-Polymer-Akkus, erzeugt die Spannungspegel 3V3 und 5V0 und verteilt sie an die einzelnen Modulplatinen sowie an die Hauptplatine. Um Schäden im Falle einer Fehlfunktion zu vermeiden, ist die Platine mit Sicherheitsmaßnahmen wie Sicherungen ausgestattet.
Die Stromverteilerplatine ist das Zentrum des Roboters. Wie der Name schon sagt, sorgt sie für die Erzeugung und Verteilung aller Versorgungsspannungen. Genauer gesagt hat sie Anschlüsse für die Lithium-Polymer-Akkus, erzeugt die Spannungspegel 3V3 und 5V0 und verteilt sie an die einzelnen Modulplatinen sowie an die Hauptplatine. Um Schäden im Falle einer Fehlfunktion zu vermeiden, ist die Platine mit Sicherheitsmaßnahmen wie Sicherungen ausgestattet.
Darüber hinaus bietet die Stromverteilungsplatine sechs Modulanschlüsse mit einer standardisierten Anschlussschnittstelle, um die unabhängige Entwicklung beliebiger Platinen zu ermöglichen, die dann individuell geändert, hinzugefügt oder verbessert werden können, ohne dass alle anderen Komponenten geändert werden müssen. Diese Funktion stellt eine wesentliche Verbesserung gegenüber der letzten Generation dar, da sie die Wartung erheblich vereinfacht und gleichzeitig die Möglichkeit bietet, die Kartentypen individuell zu verbessern und anzupassen.
Vor der Einführung des Systems waren wir selbst bei geringfügigen Änderungen an kleinen Teilen der Schaltkreise gezwungen, die gesamte Hauptplatine zu ersetzen (die sowohl die aktuelle Hauptplatine als auch einige Teile der Motorplatinen enthielt). Ausgefallene Komponenten führten in der Regel zum Austausch der gesamten Platine, da die Fehlerdiagnose ziemlich schwierig war. Mit dem Modularisierungskonzept sind wir nun in der Lage, jede Platine einzeln zu testen, was die Fehlerdiagnose vereinfacht. Deshalb ermutigen wir andere Teams, ein modularisiertes Elektronikdesign zu entwickeln.
Mainboard
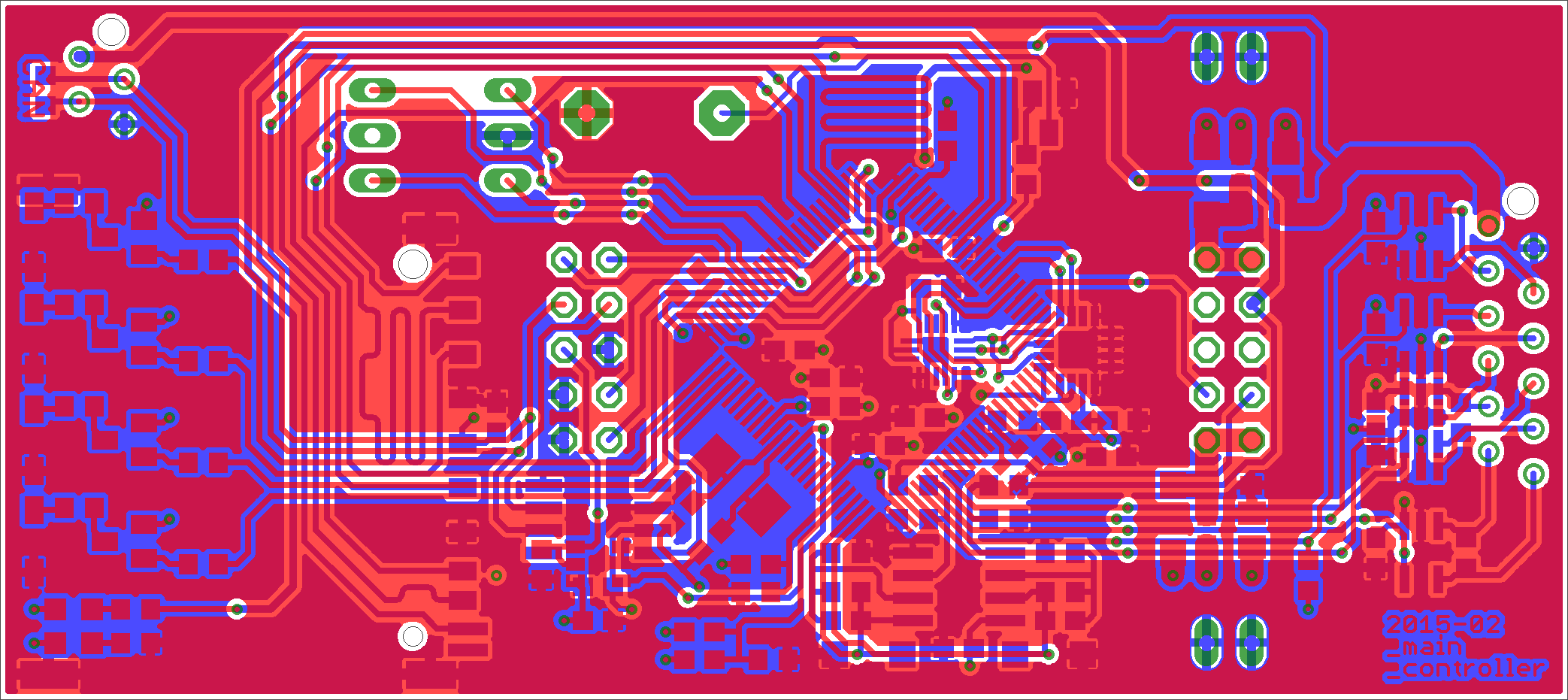 Wenn wir die Stromverteilerplatine als den Körper des Roboters bezeichnen würden, wäre die Hauptplatine sein Herz und Gehirn. Dieses Board übernimmt die gesamte Verwaltung und Organisation, d.h. es steuert den CAN-Bus und kommuniziert mit dem zentralen PC über unsere NRF-Boards (siehe später).
Wenn wir die Stromverteilerplatine als den Körper des Roboters bezeichnen würden, wäre die Hauptplatine sein Herz und Gehirn. Dieses Board übernimmt die gesamte Verwaltung und Organisation, d.h. es steuert den CAN-Bus und kommuniziert mit dem zentralen PC über unsere NRF-Boards (siehe später).
Im aktuellen Design enthält die Hauptplatine nicht mehr die Motorplatinen, sondern nur noch die wichtigen und einzigartigen Komponenten, wie das Gyroskop, den Beschleunigungsmesser und die zentrale Verarbeitungseinheit. Hinzu kommen einige Debugging-Tools, z. B. ein SD-Kartenanschluss, der das Debugging unserer Bewegungssteuerung erheblich vereinfacht.
Motor Controller
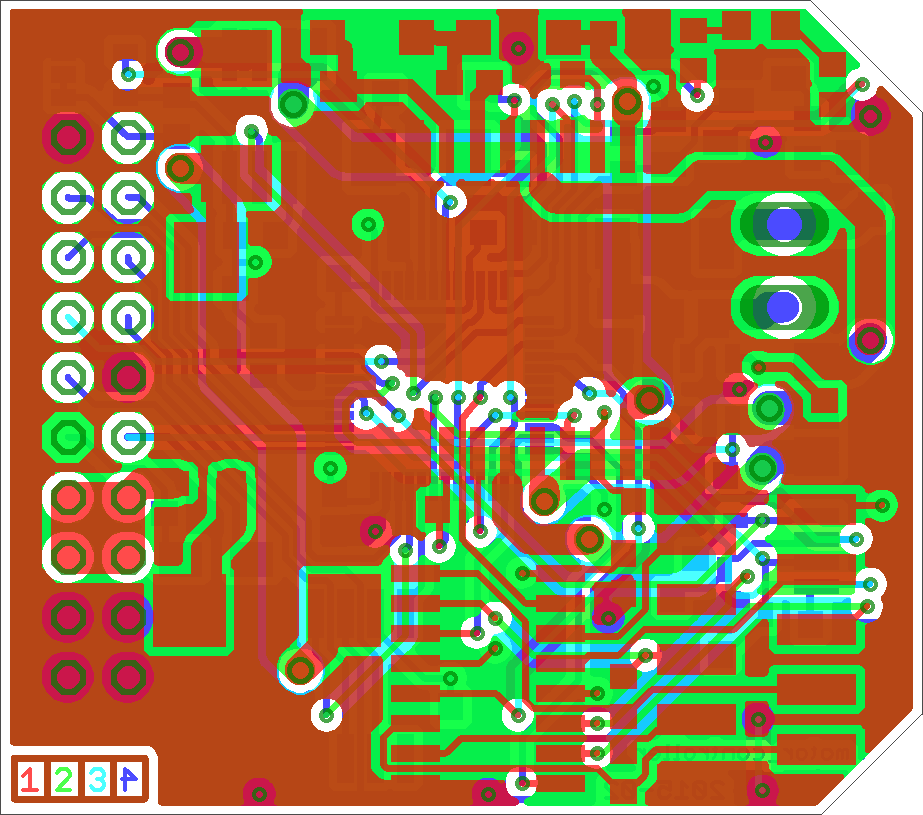 Ein wesentlicher Unterschied zwischen der alten und der neuen Generation besteht darin, dass jeder Motor von einer eigenen Modulplatine gesteuert wird, die alle relevanten Teile enthält. Die Platine versorgt den Motor mit Strom und misst sowohl seine Geschwindigkeit als auch seine Stromaufnahme. Auf diese Weise kann die Bewegungssteuerung, die auf dem auf die Motorplatine gelöteten Mikrocontroller läuft, die Fahrdynamik des Roboters präzise steuern.
Ein wesentlicher Unterschied zwischen der alten und der neuen Generation besteht darin, dass jeder Motor von einer eigenen Modulplatine gesteuert wird, die alle relevanten Teile enthält. Die Platine versorgt den Motor mit Strom und misst sowohl seine Geschwindigkeit als auch seine Stromaufnahme. Auf diese Weise kann die Bewegungssteuerung, die auf dem auf die Motorplatine gelöteten Mikrocontroller läuft, die Fahrdynamik des Roboters präzise steuern.
Flyback Controller
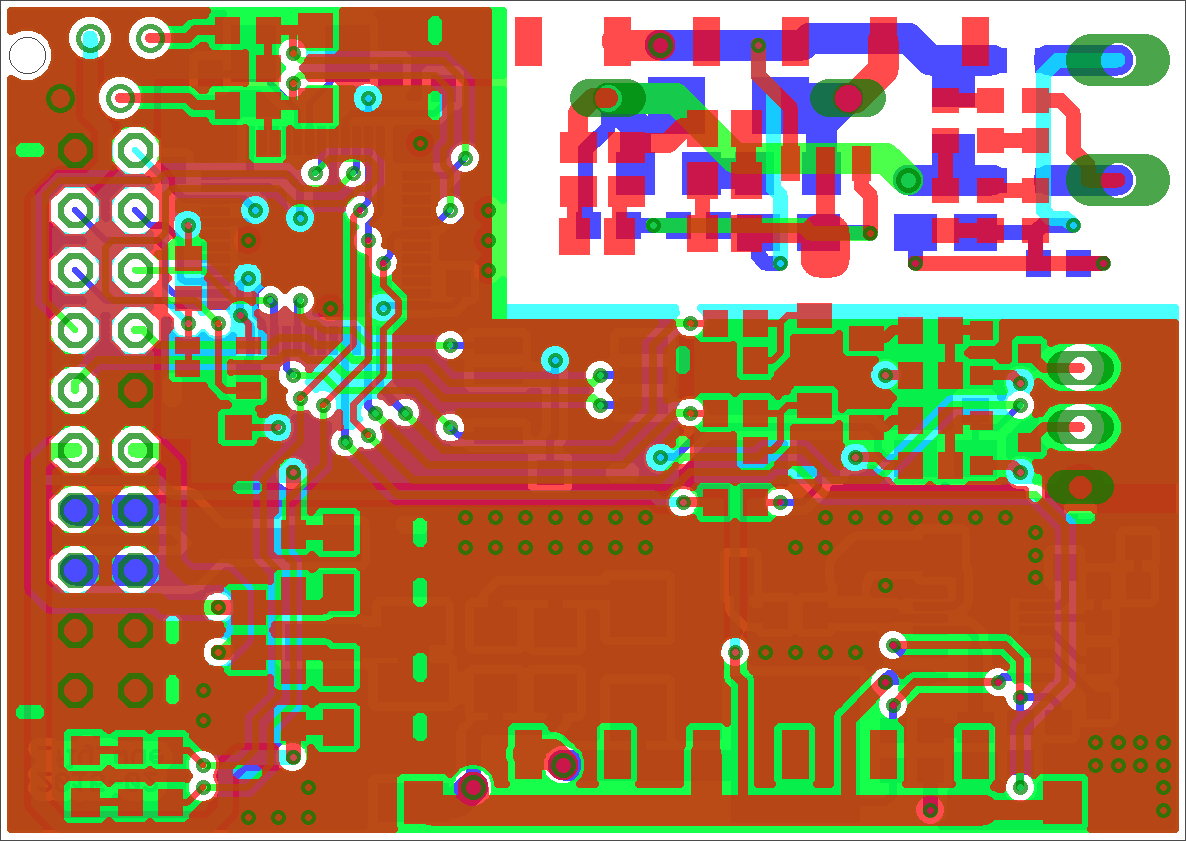 Das Schießen des Balls beruht auf dem elektromagnetischen Prinzip. Wir beschleunigen einen magnetisierbaren Kicker mit einer stromdurchflossenen Spule. Weitere Informationen über das Kicker-System finden Sie im Abschnitt Mechanik. Um die Schusskraft zu maximieren, benötigen wir eine hohe Spannung. Dazu verwenden wir eine Flyback-Schaltung, die die 15-V-Bordspannung auf ca. 210 V transformiert und damit einen Kondensator auflädt, der für den eigentlichen Schuss verwendet wird. Ein weiterer sehr wichtiger Aspekt sind die Sicherheitsmaßnahmen: Der Hochspannungskreislauf ist streng vom Rest des Bots isoliert, um Schäden an Robotern und Menschen zu vermeiden.
Das Schießen des Balls beruht auf dem elektromagnetischen Prinzip. Wir beschleunigen einen magnetisierbaren Kicker mit einer stromdurchflossenen Spule. Weitere Informationen über das Kicker-System finden Sie im Abschnitt Mechanik. Um die Schusskraft zu maximieren, benötigen wir eine hohe Spannung. Dazu verwenden wir eine Flyback-Schaltung, die die 15-V-Bordspannung auf ca. 210 V transformiert und damit einen Kondensator auflädt, der für den eigentlichen Schuss verwendet wird. Ein weiterer sehr wichtiger Aspekt sind die Sicherheitsmaßnahmen: Der Hochspannungskreislauf ist streng vom Rest des Bots isoliert, um Schäden an Robotern und Menschen zu vermeiden.
Funkboards
![]() Auf der Oberseite des Roboters sind bis zu vier NRF-Platinen angebracht, die es ihm ermöglichen, seine Befehle zu empfangen und Statusinformationen an den steuernden PC zu senden.
Auf der Oberseite des Roboters sind bis zu vier NRF-Platinen angebracht, die es ihm ermöglichen, seine Befehle zu empfangen und Statusinformationen an den steuernden PC zu senden.