
0′: Puh, das war stressig vor dem Spiel. Aber jetzt geht es los!
1′: Schön den Pass von MRL geblockt. Jetzt aber Ecke gegen uns.
2′: 0:1. Das war einfach zu fix.
3′: Es hagelt Schüsse aufs eigene Tor. Die Jungs von MRL sind deutlich agiler geworden als letztes Jahr. Wir sind am überlegen, ob wir ein Timeout nehmen.
4′: Die Armada stand bereit, aber der freistehende Roboter kam nicht schnell genug zum Schuiss. Jetzt hat MRL ein Timeout genommen, dann dürfen wir auch an den PC. Dadurch konnten wir uns nun ein Timeout sparen, denn gerade haben wir unsere Schusspräzision zugunsten der Schnelligkeit verringert.
5′: MRL hat ausgewechselt, aber den Bot nicht schnell genug reinbekommen. Kurze Überzahl, die wir allerdings nicht nutzen konnten.
6′: Wir gehen einfach nicht entschlossen und rücksichtslos genug in den Zweikampf. Es bleibt noch bei der knappen Führung von MRL.
7′: Ein spannendes Spiel!
9′: Kurz vor der Halbzeit noch das 0:2 kassiert. Da hat irgendwie einfach niemand reagiert.
Archiv der Kategorie: 2015
+++ Technical Challenge: ER-Force gewinnt gegen 11 Roboter +++
CMDragons hat sich von der Technical Challenge aus Angst um ihre Roboter verabschiedet. Daher haben wir alleine gegen 11 Bots von Mannheim und dem Weltmeister gespielt und 1:0 gewonnen!
Die anderen Spiele gingen aus unserer Sicht 0:1 bzw. 3:0 für uns und ZJUNlict aus. Damit haben wir die Technical Challenge gewonnen und können auf der Siegerehrung mit einer Trophäe rechnen 🙂



Wir sind im Viertelfinale!
Hier gibt es den offiziellen Spielplan mit Ergebnissen. Gerade war das letzte Spiel der Gruppenphase vorbei – aufgrund der besseren Tordifferenz zu STOX’s wurden wir mit zwei Siegen und einem Unentschieden Gruppenerster!
Daher werden wir morgen früh gegen den Sieger des Lucky Loser Spiels zwischen MRL und KIKS um den Einzug ins Halbfinale spielen.
Gestern Abend fand noch der erste Teil der Technical Challenge statt: Ziel war es, die Roboter eines anderen Teams fernzusteuern. Damit soll eine standardisierte Steuerung etabliert werden, die neuen Teams den Einstieg in die Liga erleichtern soll. Es waren verschiedene Fähigkeiten vorzuführen: Nur fahren, Torschuss gegen einen Torwart, gegen eine stehende Verteidigung, gegen eine fahrende Verteidigung, Ball abfangen und zwei Torschüsse nach Pässen.
Bei dieser Challenge haben wir den zweiten Platz erreicht. Nur MRL hat einen Skill mehr gezeigt. Allerdings werden die Punkte mit dem zweiten Teil der Technical Challenge heute Abend verrechnet. Dann spielen zwei Teams gemeinsam, und zwar in voller Fußballstärke: 11 gegen 11. Wir werden sehen, ob es dann am Ende doch noch für eine Trophäe reicht.
+++ Vorrunde: ER-Force vs. NEUIslanders 10:0 +++
Das letzte Vorrundenspiel konnten wir mit 10:0 für uns entscheiden. Bei diesem Stand werden Vorrundenspiele abgebrochen. Allerdings haben wir dies erst deutlich in der zweiten Hälfte erreicht, da unsere Bots das Tor einfach nicht treffen wollten.
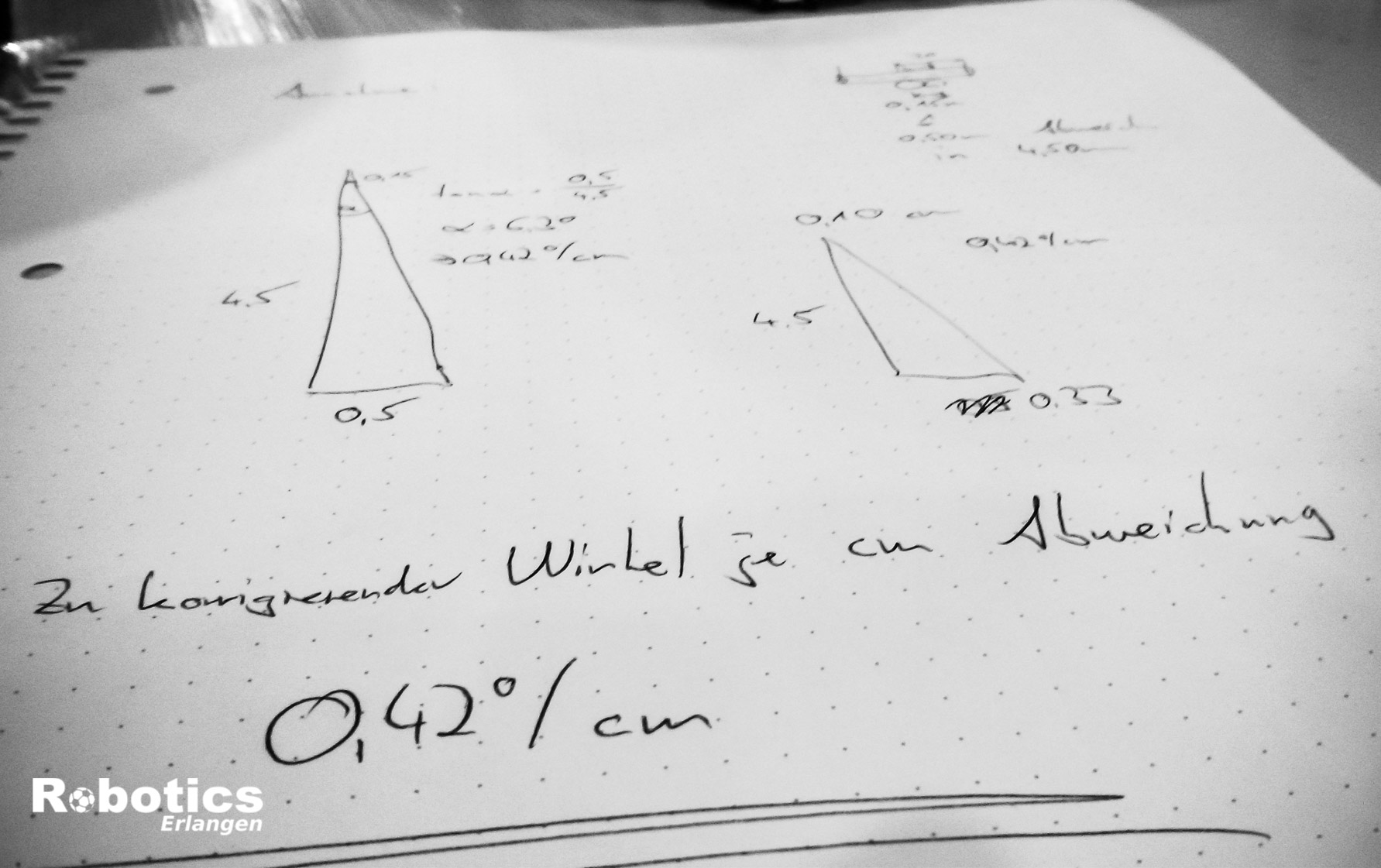
Nach dem Spiel haben wir dann analysiert warum: anscheinend schießen wir um einen gewissen Winkel verkippt, wenn der Ball nicht mittag am Roboter liegt. Kurze Rechnung hat ergeben: es sind 0,42° pro Millimeter seitlichem Versatz. 42. Hätten wir uns ja denken können…
Wir prüfen jetzt mal, ob sich das in Software korrigieren lässt, bevor die Mechaniker die Schussklappe konkav feilen müssen 😉


+++ Vorrunde: ER-Force vs. RoboJackets 7:0 +++
Spielbeginn ist um 10.30 Uhr deutscher Zeit. Wir spielen gegen das Team aus Atlanta, Georgia. Die Maskottchen der dortigen Georgia Tech sind die Yellow Jackets, Wespen, daher heißt das Team RoboJackets.
Gerade hat jemand Wasser in die Steckdose gekippt. Jetzt haben wir keinen Strom mehr. Aber keine Angst – Techniker ist informiert 😉
Update 10.40 Uhr: Der Techniker hat nichts gebracht, wir haben uns eine andere Steckdose gesucht. Gleich geht’s los!
0′: Noch vor Spielbeginn hat unsere 9 einen Stift verloren. Immerhin gibt’s genug Auswechselspieler.
1′: 1:0 durch die Nummer 1, manu dextra! Die gestrige Knieverletzung scheint vollständig auskuriert!
3′: Die Refbox wird vom Team aus Cambridge bedient, aber der gute Name steht leider nicht gleichzeitig für ein tiefergehendes Verständnis des Spiels.
5′: Wir sind im Timeout, um einen Bug zu fixen, den wir in letzter Sekunde noch produziert haben. Völlig unnötig…
7′: Der Gegner schießt bei jeder Spielfortsetzung scharf auf uns. Der Ball prallt an und geht ins Aus! Deadlock…
8′: 2:0! Schön herausgespielt nach einem langen Pass auf den Rechtsaußen…
9′: Kurz vor der Pause kam endlich unsere neue Formation, Armarda genannt, zum Einsatz: 4 Bots spielen sich frei, meist ist einer ungedeckt und kann dann frei zum Torschuss. Hat aber nicht geklappt…
10′: Elfmetertor für uns mit dem Halbzeitpfiff. Die gegnerischen Verteidiger waren mit dem Ball im Strafraum, das ist verboten – sonst könnte man das Tor ja mit Robotern zubauen.
1′: 1:0 durch die Nummer 1, manu dextra! Die gestrige Knieverletzung scheint vollständig auskuriert!
3′: Die Refbox wird vom Team aus Cambridge bedient, aber der gute Name steht leider nicht gleichzeitig für ein tiefergehendes Verständnis des Spiels.
5′: Wir sind im Timeout, um einen Bug zu fixen, den wir in letzter Sekunde noch produziert haben. Völlig unnötig…
7′: Der Gegner schießt bei jeder Spielfortsetzung scharf auf uns. Der Ball prallt an und geht ins Aus! Deadlock…
8′: 2:0! Schön herausgespielt nach einem langen Pass auf den Rechtsaußen…
9′: Kurz vor der Pause kam endlich unsere neue Formation, Armarda genannt, zum Einsatz: 4 Bots spielen sich frei, meist ist einer ungedeckt und kann dann frei zum Torschuss. Hat aber nicht geklappt…
10′: Elfmetertor für uns mit dem Halbzeitpfiff. Die gegnerischen Verteidiger waren mit dem Ball im Strafraum, das ist verboten – sonst könnte man das Tor ja mit Robotern zubauen.
11′: Es steht noch 4:0 aus der ersten Halbzeit.
12′: Nochmal Elfmeter, wieder war der Gegner im Strafraum. Das kann so weitergehen! 13′: 6:0 nach Torwartfehler.
16′: Jetzt hat die Armarda zugeschlagen! Nach einer Ecke konnte der Bot sicher ins lange Eck verwandeln!


