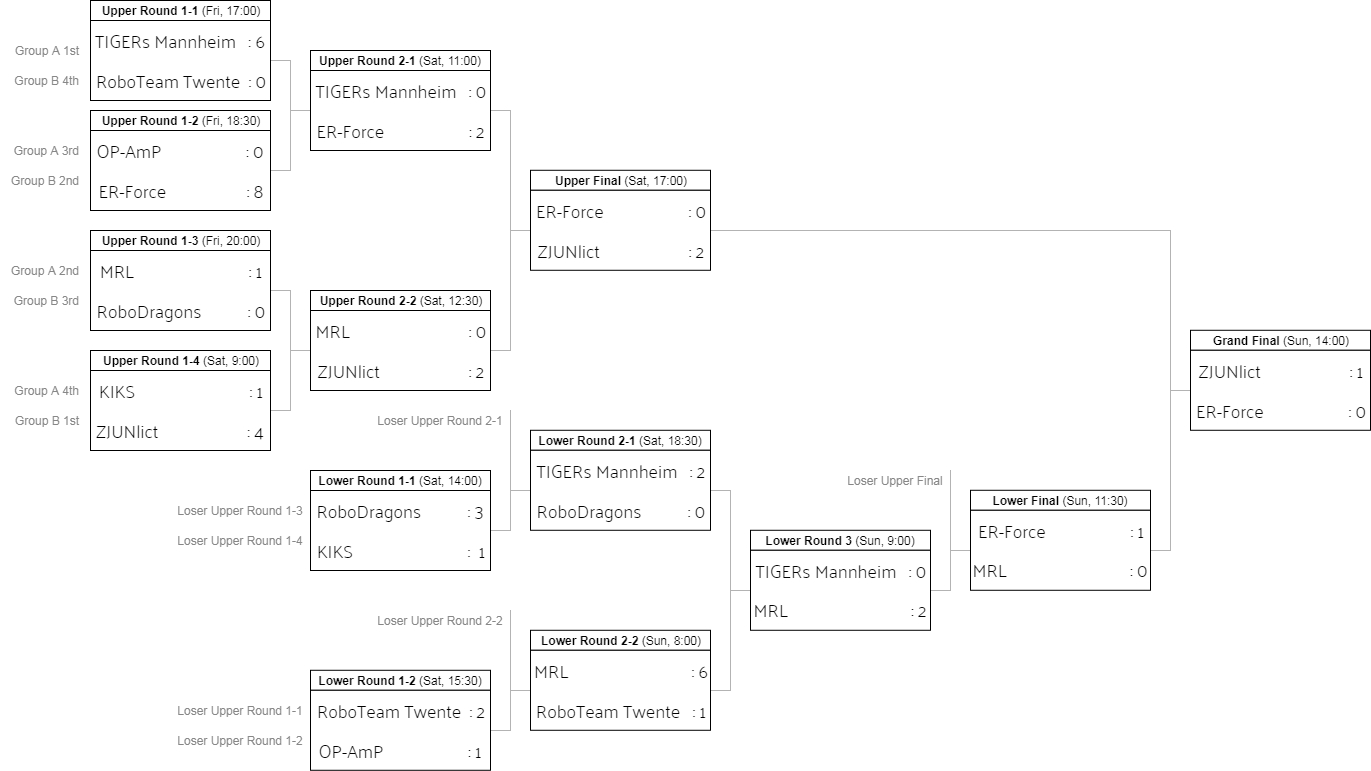
Nachdem wir uns in der Gruppenphase mittelmäßig geschlagen haben, aber trotzdem Gruppenzweiter geworden sind, waren die Spiele der Knockoutphase an Tag 3 und 4 des RoboCups deutlich erfolgreicher. Wir starteten im Upper Bracket (der oberen Hälfte) und hatten deshalb im ersten Spiel einen etwas leichter zu bewältigenden Gegner: Wir konnten gegen das japanische Team OP-AmP ein souveränes 8:0 spielen. Durch dieses Ergebnis wurden unsere Hoffnungen auf Erfolg beim RoboCup deutlich gesteigert. Gleichzeitig war uns aber bewusst, dass wir uns nicht darauf ausruhen durften, sondern die schweren Spiele erst noch kommen würden.
 In allen Spielpausen wurde daher weiter fleißig an unserem Prototypen der neuen Generation gearbeitet. Hierbei hatten wir immer mehr Erfolge zu feiern, zum Beispiel konnten wir die Lichtschranke im Dribbler erfolgreich testen. Unter anderem auch dank der Fortschritte beim Funk konnten wir erstmals Fahr- und Schusstests auf dem Testfeld durchführen. Die Ergebnisse waren begeisternd, deckten aber auch viele neue Probleme auf.
In allen Spielpausen wurde daher weiter fleißig an unserem Prototypen der neuen Generation gearbeitet. Hierbei hatten wir immer mehr Erfolge zu feiern, zum Beispiel konnten wir die Lichtschranke im Dribbler erfolgreich testen. Unter anderem auch dank der Fortschritte beim Funk konnten wir erstmals Fahr- und Schusstests auf dem Testfeld durchführen. Die Ergebnisse waren begeisternd, deckten aber auch viele neue Probleme auf.
Unser zweites Spiel war gegen TIGERs Mannheim. Wir erwarteten knapp zu verlieren. Die Roboter aus Mannheim sind unserer alten Generation technisch stark überlegen, doch ihre kleinen Räder wurden leider durch die hohen Linien beschädigt. Sie lösten sich teilweise auf dem Spielfeld in ihre Einzelteile auf. Dies bescherte uns einen gewissen Vorteil und dank der Robustheit unserer Roboter konnten wir ein 2:0 erspielen.
 Natürlich bietet der RoboCup neben den Spielen auch die Möglichkeit, sich mit anderen Teams auszutauschen, fachzusimpeln und Freundschaften zu knüpfen. Das haben wir auch ligaübergreifend genutzt und uns in arbeitsfreien Minuten sehr angeregt unterhalten und alte Bekannte wieder getroffen. Es war schön die Fortschritte von TIGERs Mannheim und RoboTeam Twente seit unseren gemeinsamen Testspielen Anfang April zu sehen.
Natürlich bietet der RoboCup neben den Spielen auch die Möglichkeit, sich mit anderen Teams auszutauschen, fachzusimpeln und Freundschaften zu knüpfen. Das haben wir auch ligaübergreifend genutzt und uns in arbeitsfreien Minuten sehr angeregt unterhalten und alte Bekannte wieder getroffen. Es war schön die Fortschritte von TIGERs Mannheim und RoboTeam Twente seit unseren gemeinsamen Testspielen Anfang April zu sehen.
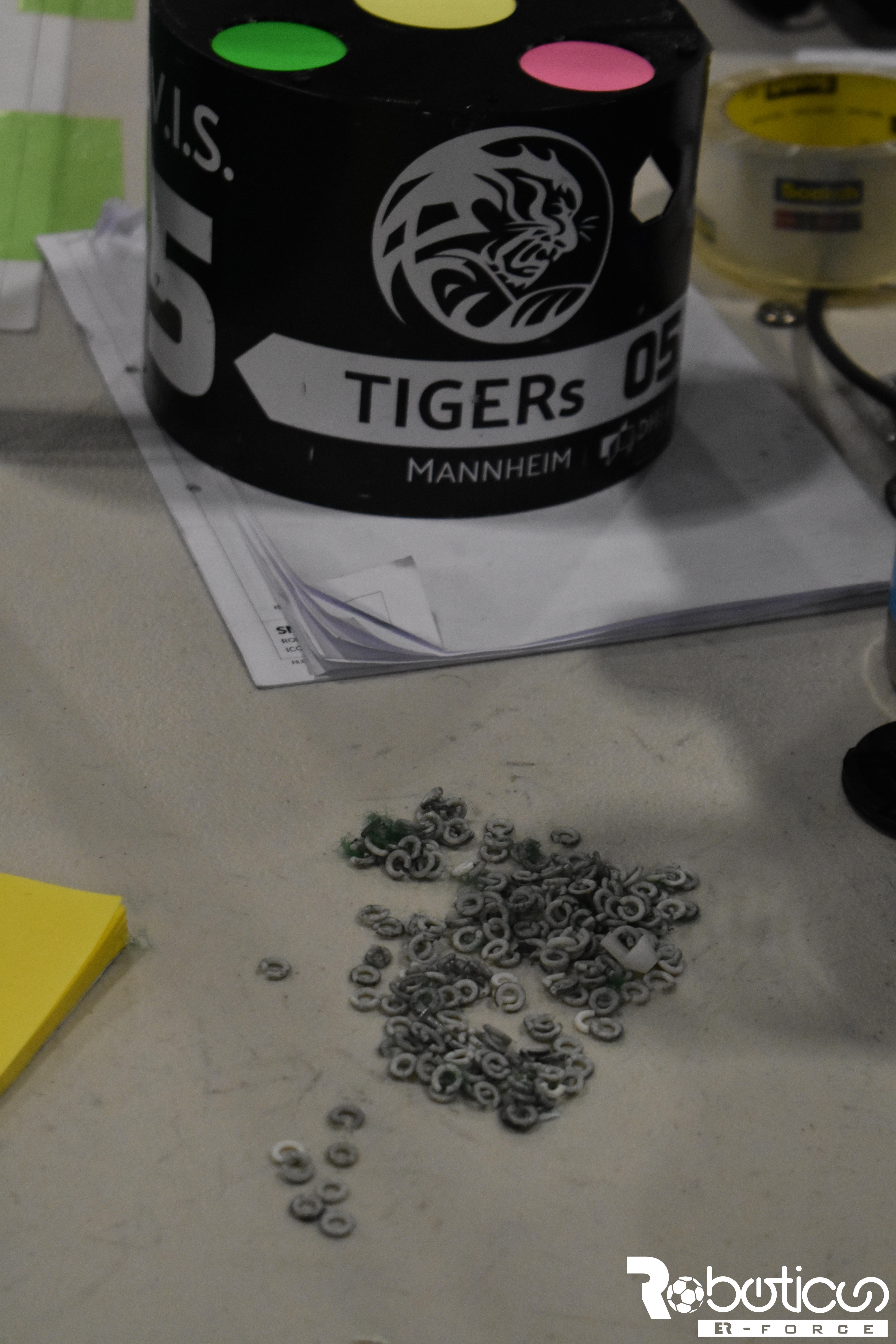
Das für uns teils überraschende Ergebnis von 0:2 gegen ZJUNlict aus China resultierte in unserem leider letzten Spiel im Upper Bracket. Uns war von vornherein klar, dass wir nicht souverän gewinnen würden. Doch die Hoffnung auf ein Unentschieden gegen die (hardware- und softwareseitig) extrem starken Chinesen blieb lange bestehen. Wir konnten gut verteidigen, doch am Ende reichte es nicht und wir rutschten in das Lower Bracket ab. Trotzdem war uns hiermit schon der dritte Platz sicher und wir freuten uns über eine jetzt schon bessere Platzierung als letztes Jahr in Kanada (Platz 4). Bevor wir auf unseren ersten Gegner im Lower Bracket trafen, waren wir noch ein bisschen detektivisch unterwegs. Seit Beginn des Turniers wurden immer wieder kleine Metallblättchen auf dem Spielfeld gefunden. Aus bestimmten Blickwinkeln reflektierten diese das Licht so, dass sie wie verlorene Schrauben aussahen. Doch nicht nur diese optische Täuschung stellte ein Problem dar, sondern auch ihre sehr gute Leitfähigkeit (~0 Ω). Falls eines dieser Blättchen irgendwie einen Weg in einen Roboter finden und dort schlecht landen würde, könnte es zu einem Kurzschluss kommen. Dieser kann dazu führen, dass Roboter kaputtgehen oder sogar Feuer fangen. Nachdem wir das Feld bestmöglichst davon befreit hatten und auch die Ursprungroboter der Blättchen gefunden hatten, konnte das Spiel gegen unseren sehr ambitionierten Gegner MRL aus dem Iran stattfinden. Zum Glück konnten wir hier einen Sieg mit 1:0 feiern und standen somit im Finale, um dort nun zum dritten Mal in diesem Turnier gegen das chinesische Team ZJUNlict anzutreten.
Bevor wir auf unseren ersten Gegner im Lower Bracket trafen, waren wir noch ein bisschen detektivisch unterwegs. Seit Beginn des Turniers wurden immer wieder kleine Metallblättchen auf dem Spielfeld gefunden. Aus bestimmten Blickwinkeln reflektierten diese das Licht so, dass sie wie verlorene Schrauben aussahen. Doch nicht nur diese optische Täuschung stellte ein Problem dar, sondern auch ihre sehr gute Leitfähigkeit (~0 Ω). Falls eines dieser Blättchen irgendwie einen Weg in einen Roboter finden und dort schlecht landen würde, könnte es zu einem Kurzschluss kommen. Dieser kann dazu führen, dass Roboter kaputtgehen oder sogar Feuer fangen. Nachdem wir das Feld bestmöglichst davon befreit hatten und auch die Ursprungroboter der Blättchen gefunden hatten, konnte das Spiel gegen unseren sehr ambitionierten Gegner MRL aus dem Iran stattfinden. Zum Glück konnten wir hier einen Sieg mit 1:0 feiern und standen somit im Finale, um dort nun zum dritten Mal in diesem Turnier gegen das chinesische Team ZJUNlict anzutreten.
Zwischen dem Spiel gegen MRL und dem Finale blieb uns nur eine halbe Stunde Zeit um alle Akkus wieder vollzuladen. Doch wir hatten sowohl zu Spielbeginn genug Akkus fertig, als auch Wechselakkus zur Halbzeitpause. Das Finale gegen ZJUNlict war extrem spannend und wir hatten eine Menge Zuschauer. Nachdem wir gegen Ende des Spiels mit 0:1 Rückstand zu kämpfen hatten und die Aussicht auf Besserung bei gleichbleibender Spielweise gleich null war, traf unsere Strategie eine radikale Entscheidung: In einem Timeout wechselten wir auf maximalen Angriff. Alle unsere Roboter platzierten sich in der gegnerischen Hälfte und nur unser Torwart mit der Nummer 10 blieb in unserer Hälfte, um zu verteidigen. Die Chinesen waren geschockt und konnten gar nicht fassen, was gerade passiert. Leider hat es nicht mehr für ein Tor unsererseits gereicht. Doch auch der Angriff der Chinesen war nicht stark genug, um unseren sehr stark verteidigenden Torwart zu bewältigen. Somit endete das Spiel mit tosendem Applaus und einer Lobeshymne auf unseren Torwart, der spontan Manuel getauft wurde. Wir sind glücklich und zufrieden Vizeweltmeister geworden. Gratulation!!!!